seL4#
本文档的分析主要基于 RISC-V 架构。
Tutorial#
seL4 构建基于多种工具,包括 repo、ninja 等。Tutorial 测例默认在 x86 架构的 QEMU 上运行。
运行 hello-world 退出后报错 Caught cap fault,将 return 0 改为执行 exit 后不再出现报错。
ninja 构建 hello-camkes-0 报错 make: stack: No such file or directory,一个解决办法是执行 curl -sSL https://get.haskellstack.org/ | sh 安装 haskell-stack,然后报错 Timeout,解决网络问题后可以正常运行。
Hardware#
支持 Rocket 硬件平台。
hardware.yml 给出的硬件描述,以 uintc 为例:
- compatible:
- riscv,uintc0
regions:
- index: 0
kernel: UINTC_PPTR
kernel_size: 0x4000
user: true
其中 kernel 字段表示内核映射后的 device 起始地址。
Capability#
A capability is a unique, unforgeable token that gives the possessor permission to access an entity or object in system.
Capability (cap) 是 seL4 的核心机制,通过唯一且不可伪造的 token 来获取对象的访问权限,可以将 cap 视为带有访问控制的指针。
root task 在初始化时会获取所有资源的 cap ,例如 seL4_CapInitThreadTCB,可以通过 API 读取或修改 TCB 的内容。
CSpace 表示一个 thread 持有的全部 cap 。
CNodes & CSlots:可以将 CNode 视为 cap 数组,数组元素被称为 CSlot ,CSlot 可以看成是 Option<Cap> 类型。1 << info->CNodeSizeBits 表示数组大小,1 << seL4_SlotBits 表示 CSlot 大小。每个 thread 的 TCB 中有一个 CNode cap ,即 CSpace root 。Invocation 会隐式地通过 CSpace root 访问 CNode ,并通过其中的 CSlot 访问资源。可以通过以下字段寻址 CSlot:
_service/root:对应的 CNode cap
index:CSlot 在 CNode 中的下标
depth:默认为
seL4_WordBits(寻址index << seL4_WordBits)
以 root task 为例, 访问 TCB 的过程大致为 seL4_CapInitThreadCNode -> CNode -> seL4_CapInitThreadTCB -> TCB 。seL4_bootInfo 描述了初始 CSpace 中的 cap 和空闲 CSlot 。
TCB#
从 struct tcb 出发,分析其成员的含义:
arch_tcb_t tcbArch:arch 相关的状态,主要包含上下文的内容。逐级展开可以的得到word_t registers[n_contextRegisters],相关定义位于enum _register,除了 31 个通用寄存器外(不包括 zero),还包含sstatus和scause等,可以在其中加入其他需要保存和恢复的用户态寄存器。thread_state_t tcbState:线程状态,主要包括:ThreadState_InactiveThreadState_RunningThreadState_RestartThreadState_BlockedOnReceiveThreadState_BlockedOnSendThreadState_BlockedOnReplyThreadState_BlockedOnNotification
notification_t *tcbBoundNotification:指向该线程对应的 Notification ,若该指针非空,该线程可以接收 Signalsh ceshceseL4_Fault_t tcbFault:lookup_fault_t tcbLookupFailure:dom_t tcbDomain:prio_t tcbMCP:prio_t tcbPriority:线程优先级sched_context_t *tcbSchedContext:该线程对应的调度上下文,若该指针为空,线程不可被加入调度队列sched_context_t *tcbYieldTo:线程切换至的调度上下文word_t tcbIPCBuffer:用户空间的 IPC 缓冲区的虚拟地址word_t tcbAffinity:正在运行该线程的核号struct tcb *tcbSchedNext, *tcbSchedPrev:调度队列的链表指针struct tcb *tcbEPNext, *tcbEPPrev:Notification 队列的链表指针
实际的 TCB 还包括头部的 cte_t ,tcb_t 默认占据 TCB 的后半部分空间。
// A diagram of a TCB kernel object that is created from untyped:
// _______________________________________
// | | | |
// | | | |
// |cte_t| unused | tcb_t |
// | |(debug_tcb_t)| |
// |_____|_____________|___________________|
// 0 a b c
// a = tcbCNodeEntries * sizeof(cte_t)
// b = BIT(TCB_SIZE_BITS)
// c = BIT(seL4_TCBBits)
常用内核函数:
void tcbEPDequeue(tcb_t *tcb, tcb_queue_t queue):将当前 TCB 从队列(EP 或 Ntfn 的等待队列)中移除cpu_id_t getCurrentCPUIndex(void):从sscratch寄存器中读出当前核号void tcbSchedEnqueue(tcb_t *tcb):将 TCB 置于调度队列的头部void tcbSchedAppend(tcb_t *tcb):将 TCB 置于调度队列的头部void remoteQueueUpdate(tcb_t *tcb):发送ipiReschedulePending更新目标核的调度目标void setRegister(tcb_t *thread, register_t reg, word_t w):设置寄存器thread->tcbArch.tcbContext.registers[reg] = wNODE_STATE(ksCurThread):获取当前正在运行的 TCB (多用于系统调用)
MCS#
IPC#
这篇文章辨析了 seL4 IPC 机制。
seL4 中的 IPC 机制可以在线程之间传递消息(endpoint结构),也可以让线程和内核服务进行通信(其他内核结构)。IPC 传递的消息被保存在 Message Register 中(简称 MR),如果消息长度较短,可直接通过物理寄存器来传递,否则使用 IPC buffer 。消息的元结构为 seL4_MessageInfo_t ,包含以下字段:
block seL4_MessageInfo {
field label 52 // 原始信息
field capsUnwrapped 3 //
field extraCaps 2 // cap 数量
field length 7 // 消息长度
}
IPC buffer 结构包含以下字段:
typedef struct seL4_IPCBuffer_ {
seL4_MessageInfo_t tag; // 元信息
seL4_Word msg[seL4_MsgMaxLength]; // 消息内容
seL4_Word userData; // 该结构起始地址
// 发送的 cap 或标识符
seL4_Word caps_or_badges[seL4_MsgMaxExtraCaps];
// 以下结构用于定位接收 cap 的 slot
seL4_CPtr receiveCNode;
seL4_CPtr receiveIndex;
seL4_Word receiveDepth;
} seL4_IPCBuffer __attribute__((__aligned__(sizeof(struct seL4_IPCBuffer_))));
内核结构包含以下字段:
block endpoint {
field epQueue_head 64 // 等待队列头部
field_high epQueue_tail 37 // 等待队列尾部
field state 2 // 当前状态
}
block endpoint_cap {
field capEPBadge 64 // 标识符,非0标识符不可被修改
field capType 5 // cap 类型
field capCanGrantReply 1 //
field capCanGrant 1 //
field capCanReceive 1 // 可以接收
field capCanSend 1 // 可以发送
field_high capEPPtr 39 // 指向 endpoint 内核结构
}
block reply_cap {
field capTCBPtr 64 // 指向绑定的 TCB
field capType 5 // cap 类型
field capReplyCanGrant 1 // 源自 endpoint_cap 的 capCanGrant 字段
#ifndef CONFIG_KERNEL_MCS
field capReplyMaster 1
#endif
}
state 字段指定 EP 的三种状态:
EPState_Send:等待队列中有 TCB 等待发送
EPState_Recv:等待队列中有 TCB 等待接收
EPState_Idle:等待队列为空
IPC 的发送与接收都是阻塞的,也就是说当调用 seL4_Send 或 seL4_Call 时如果没有接收方,发送方会进入等待队列;当调用 seL4_Recv 和 seL4_ReplyRecv 时如果没有发送方,接收方会进入等待队列。无写权限的 Send 和 Call 不会触发错误,但是有读权限的 Recv 会触发 seL4_Fault_* 错误。IPC 可以发送 cap ,但 sender 必须有 Grant 权限。如果发送了表示内核结构的 cap ,这些额外的 cap 会被标记在 tag 的 capsUnwrapped 字段,只有 badge 被发送,这样接收方的 slot 可以用来保存其他 cap 。
将一次 IPC 发送或接收看成一次事务,该事务是非原子的。也就是说错误发生前的操作可以被正常完成,错误后的操作会被中止。
reply_cap 在发送方调用 seL4_Call 时自动生成,其中的 capTCBPtr 字段指向发送方。可以通过 seL4_Reply 直接调用 reply_cap ,也可以通过 seL4_CNode_SaveCaller 将该 cap 保存在其他 slot ,这样可以之后通过 seL4_Send 进行调用。capReplyCanGrant 字段表示是否可以通过 reply_cap 在回复的消息中发送 cap 。对于 reply_cap 的调用一定是非阻塞的,也就是说一定指向某个正在等待回复的 sender 。caller 接收回复的消息和 seL4_Recv 的流程类似。
内核相关函数:
注:内核函数参数类型为
tcb_t *时名称却不一样,下面统一为tcb_t *tcb
void sendIPC(bool_t blocking, bool_t do_call, word_t badge, bool_t canGrant, bool_t canGrantReply, tcb_t *tcb, endpoint_t *epptr):不同的状态处理方法不同:EPState_Idle 和 EPState_Send:如果指定为 blocking ,则将当前 TCB 状态设置为 ThreadState_BlockingOnSend,并设置 blockingObject、blockingIPCBadge、blockingIPCCanGrant、blockingIPCCanGrantReply、blockingIPCIsCall 属性,将该 TCB 放入 EP 等待队列中
EPState_Recv:从等待队列头部取出 TCB ,若此时等待队列为空,则转为 EPState_Idle ;调用
doIPCTransfer;如果是 IPC Call ,通过setupCallerCap创建 reply_cap ,否则将目标 TCB 的状态设置为ThreadState_Running并进行调度
void receiveIPC(tcb_t *tcb, cap_t cap, bool_t isBlocking):首先检查 TCB 是否有待接收的 Signal ,如果有则优先调用completeSignal(Signal 是消息长度为 0 的 IPC);不同的状态处理方法不同:EPState_Idle 和 EPState_Recv:如果指定为 blocking ,则将当前 TCB 状态设置为 ThreadState_BlockingOnReceive,设置 blockingObject 和 blokcingIPCCanGrant ,将 TCB 加入 EP 的等待队列中,状态转为 EPState_Recv
EPState_Send:从等待队列头部取出 sender ,如果等待队列为空,转为 EPState_Idle 状态;获取 sender 保存的 badge,canGrant,canGrantReply 信息,调用
doIPCTransfer;如果是 IPC Call ,通过setupCallerCap创建 reply_cap ,否则将目标 TCB 的状态设置为ThreadState_Running并进行调度
void cancelIPC(tcb_t *tcb):根据 TCB 状态进行判断:ThreadState_BlockOnSend 和 ThreadState_BlockOnReceive:从等待队列中移除该 TCB ,并将 TCB 状态设置为 ThreadState_Inactive
ThreadState_BlockedOnNotification:调用
cancelSignalThreadState_BlockedOnReply:移除 reply_cap
void cancelAllIPC(endpoint_t *epptr):状态转为 EPState_Idle ,清空等待队列,将其中所有 TCB 加入调度队列,状态设置为 ThreadState_Restart
Notification#
block notification {
#ifdef CONFIG_KERNEL_MCS
field_high ntfnSchedContext 39
#endif
field_high ntfnBoundTCB 39 // 指向绑定的 TCB
field ntfnMsgIdentifier 64 // msg 标识符
field_high ntfnQueue_head 39 // 等待队列头部
field_high ntfnQueue_tail 39 // 等待队列尾部
field state 2 // 当前状态
}
block notification_cap {
field capNtfnBadge 64 // badge 标识符
field capType 5 // cap 类型
field capNtfnCanReceive 1 // 可以接收
field capNtfnCanSend 1 // 可以发送
field_high capNtfnPtr 39 // 指向 notification 内核结构
}
state 字段指定 Notification 的三种状态:
NtfnState_Waiting:TCB 在队列中等待接收信号
NtfnState_Active:TCB 接收到信号但等待队列为空
NtfnState_Idle:以上两种状态之外的状态
内核相关函数:
注:内核函数参数类型为
tcb_t *时名称却不一样,下面统一为tcb_t *tcb
void bindNotification(tcb_t *tcb, notification_t *ntfnPtr):将 notification 绑定到指定的 TCB ,将 ntfnPtr 赋值给 tcbBoundNotification ,将 tcb 赋值给 ntfnBoundTCBvoid unbindNotification(tcb_t *tcb):取消绑定void sendSignal(notification_t *ntfnPtr, word_t badge):不同的状态处理方法不同:NtfnState_Idle:如果绑定到 TCB ,则根据 TCB 当前状态进行判断,若处于 ThreadState_BlockedOnReceive ,切换到该 TCB 开始运行,并设置 badge 标识符,否则转为 NtfnState_Active 状态
NtfnState_Waiting:从等待队列中取出一个唤醒并开始执行,如果队列变为空则转为 NtfnState_Idle 状态
NtfnState_Active:已经有正在等待响应的 badge 了,直接与当前 badge 进行或操作
void receiveSignal(tcb_t *tcb, cap_t cap, bool_t isBlocking):根据 cap 获取 Notification 对象指针,不同状态的处理方法不同:NtfnState_Idle 和 NtfnState_Waiting:若采用阻塞方法(isBlocking 为 1),则设置 TCB 状态为 ThreadState_BlockedOnNotification ,并设置 TCB 的 blockingObject 为当前 ntfnPtr ,将 TCB 放到 Ntfn 等待队列尾部等待唤醒,转为 NtfnState_Waiting 状态
NtfnState_Active:将 TCB 的 badgeRegister 设置为 ntfnMsgIdentifier ,转为 NtfnState_Idle 状态
void cancelSignal(tcb_t *tcb, notification_t *ntfnPtr):将 TCB 从 Ntfn 等待队列中移除,若等待队列为空则转为 NtfnState_Idle 状态,将 TCB 当前状态设置为 ThreadState_Inactivevoid completeSignal(notification_t *ntfnPtr, tcb_t *tcb):若当前状态为 NtfnState_Active ,则 设置对应 tcb 的 badge 寄存器,转为 NtfnState_Idlevoid cancelAllSignals(notification_t *ntfnPtr):状态转为 NtfnState_Idle ,清空等待队列,将其中所有 TCB 加入调度队列,状态设置为 ThreadState_Restart
IRQ#
相关 Cap 如下:
IRQControl:由 root 进行管理,不可被复制
IRQHandler:通过调用 IRQControl 获取对应中断的访问权限,可以被复制;通过
seL4_IRQControl_Get(seL4_IRQControl _service, seL4_Word irq, seL4_CNode root, seL4_Word index, seL4_Uint8 depth)获取
seL4_IRQHandler_SetNotification 将 IRQHandler 绑定至 Notification 接收中断,如果想让 Notification 接收多个中断,可以让 badge 绑定至不同的 IRQHandler 。中断可以通过 seL4_Poll 或 seL4_Wait 来感知。通过 Notification 接收中断并进行处理后,可以通过 seL4_IRQHandler_Ack 来响应中断(准备接收下一个中断)或 seL4_IRQHandler_Clear 来取消绑定。
Boot#
从 head.S 入手分析 kernel 的启动流程:
/* Call bootstrapping implemented in C with parameters:
* a0/x10: user image physical start address
* a1/x11: user image physical end address
* a2/x12: physical/virtual offset
* a3/x13: user image virtual entry address
* a4/x14: DTB physical address (0 if there is none)
* a5/x15: DTB size (0 if there is none)
* a6/x16: hart ID (SMP only, unused on non-SMP)
* a7/x17: core ID (SMP only, unused on non-SMP)
*/
_start:
fence.i
.option push
.option norelax
1:auipc gp, %pcrel_hi(__global_pointer$)
addi gp, gp, %pcrel_lo(1b)
.option pop
/* 多核下为每个核分配栈空间 */
la sp, (kernel_stack_alloc + BIT(CONFIG_KERNEL_STACK_BITS))
csrw sscratch, x0 /* zero sscratch for the init task */
#if CONFIG_MAX_NUM_NODES > 1
mv t0, a7
slli t0, t0, CONFIG_KERNEL_STACK_BITS
add sp, sp, t0
csrw sscratch, sp
#endif
/* 内核初始化 */
jal init_kernel
/* 恢复用户态上下文(返回到 root) */
la ra, restore_user_context
jr ra
Syscalls#
可在官网查看 API 说明,相关定义位于 libsel4/include/api/syscall.xml 。
seL4 riscv 的 syscall 实现位于 libsel4/arch_include/riscv/sel4/arch/syscalls.h ,对上暴露的 API 保持一致,内部实现 riscv_sys_send ,riscv_sys_send_null 等函数,这些函数基本的执行逻辑为通过 ecall 指令陷入内核并通过寄存器传递参数。以 seL4_Signal 为例,目前默认的实现方法为:
LIBSEL4_INLINE_FUNC void seL4_Signal(seL4_CPtr dest)
{
riscv_sys_send_null(seL4_SysSend, dest, seL4_MessageInfo_new(0, 0, 0, 0).words[0]);
}
static inline void riscv_sys_send_null(seL4_Word sys, seL4_Word src, seL4_Word info_arg)
{
register seL4_Word destptr asm("a0") = src;
register seL4_Word info asm("a1") = info_arg;
/* Perform the system call. */
register seL4_Word scno asm("a7") = sys;
asm volatile(
"ecall"
: "+r"(destptr), "+r"(info)
: "r"(scno)
);
}
相当于和 seL4_Send 共用了内核接口,换句话说,可以将 seL4_Signal 视为消息长度为空的 seL4_Send 。
注意到开关 MCS 参数前后,系统调用的实现方式是不一样的,以 seL4_Poll 为例:
LIBSEL4_INLINE_FUNC seL4_MessageInfo_t seL4_Poll(seL4_CPtr src, seL4_Word *sender)
{
#ifdef CONFIG_KERNEL_MCS
return seL4_NBWait(src, sender);
#else
return seL4_NBRecv(src, sender);
#endif
}
内核系统调用处理函数入口为 exception_t handleSyscall(syscall_t syscall) 。下面分别对不同系统调用的处理进行分析。
static exception_t handleInvocation(bool_t isCall, bool_t isBlocking) 函数主要用来处理 Send 和 Call 等系统调用:
// 获取 a0 和 a1 寄存器中的 cap 和 msg 元信息
seL4_MessageInfo_t info = messageInfoFromWord(getRegister(thread, msgInfoRegister));
cptr_t cptr = getRegister(thread, capRegister);
// 在当前 cspace 中查找 cptr(权限检查)
lookupCapAndSlot_ret_t lu_ret = lookupCapAndSlot(thread, cptr);
// 获取 IPC buffer 的起始地址,对 Buffer 的类型和读写权限进行检查
word_t *buffer = lookupIPCBuffer(false, thread);
// 在 buffer 中遍历 extra caps
exception_t status = lookupExtraCaps(thread, buffer, info);
// 根据 cap 类型进行处理,检查 cap 是否可以发送(CanSend)
status = decodeInvocation(seL4_MessageInfo_get_label(info), length,
cptr, lu_ret.slot, lu_ret.cap,
isBlocking, isCall, buffer);
static void handleRecv(bool_t isBlocking) 函数主要用来处理 Recv 和 NBRecv 等系统嗲用:
// 获取 a0 寄存器中的 cap
cptr_t cptr = getRegister(thread, capRegister);
// 在当前 cspace 中查找 cptr(权限检查)
lookupCapAndSlot_ret_t lu_ret = lookupCapAndSlot(thread, cptr);
// 根据 cap 类型进行处理
switch (cap_get_capType(lu_ret.cap)) {
case cap_endpoint_cap:
// 检查 ep 是否可以接收(CanReceive)
receiveIPC(thread, lu_ret.cap, isBlocking);
case cap_notification_cap:
// 检查 cap 是否对应该线程绑定的 ntfn
receiveSignal(NODE_STATE(ksCurThread), lu_ret.cap, isBlocking);
default:
}
seL4test#
root 是 sel4test-driver ,启动时获取 seL4_Bootinfo_t ,为测例的运行提供环境。bootstrap 运行环境主要是为了测试创建进程和与其通信的功能是否正常。root 通过 linker section 来在运行时选择测例,可以通过字符串匹配在编译期对测例进行选择。测例是依次运行的,root 可以选择是否在测例运行失败后中止测试。
sel4test-driver 运行流程:
main ->
main_continued ->
sel4test_run_tests ->
test_types[tt]->run_test(tests[i])
sel4test_run_tests 根据 __start__test_type 到 __stop__test_type 加载 struct test_type 信息,对 test 进行过滤后依次运行每个 test (不同 test_type 可以有多个 test)。
ipc.c 测例集中的测例大部分是基于 test_ipc_pair 这个函数,下面对代码中的一些关键片段进行分析:
// 分配 endpoint_cap
seL4_CPtr ep = vka_alloc_endpoint_leaky(vka);
// 分配 reply_cap
seL4_CPtr a_reply = vka_alloc_reply_leaky(vka);
// 将当前进程的 cspace 复制到新创建的进程,目的是为了让 sender 和 receiver 间能共享 endpoint
cspacepath_t path;
create_helper_process(env, &thread_a);
vka_cspace_make_path(&env->vka, ep, &path);
thread_a_arg0 = sel4utils_copy_path_to_process(&thread_a.process, path);
// 线程默认共享 cspace ,所以可以直接创建
create_helper_thread(env, &thread_a);
// 设置 sender 的调度优先级
set_helper_priority(env, &thread_a, sender_prio);
// 绑定 sender 运行的核
set_helper_affinity(env, &thread_a, core_a);
// 开始执行线程(进程)
start_helper(env, &thread_a, (helper_fn_t) fa, thread_a_arg0, start_number,
thread_a_reply, nbwait_should_wait);
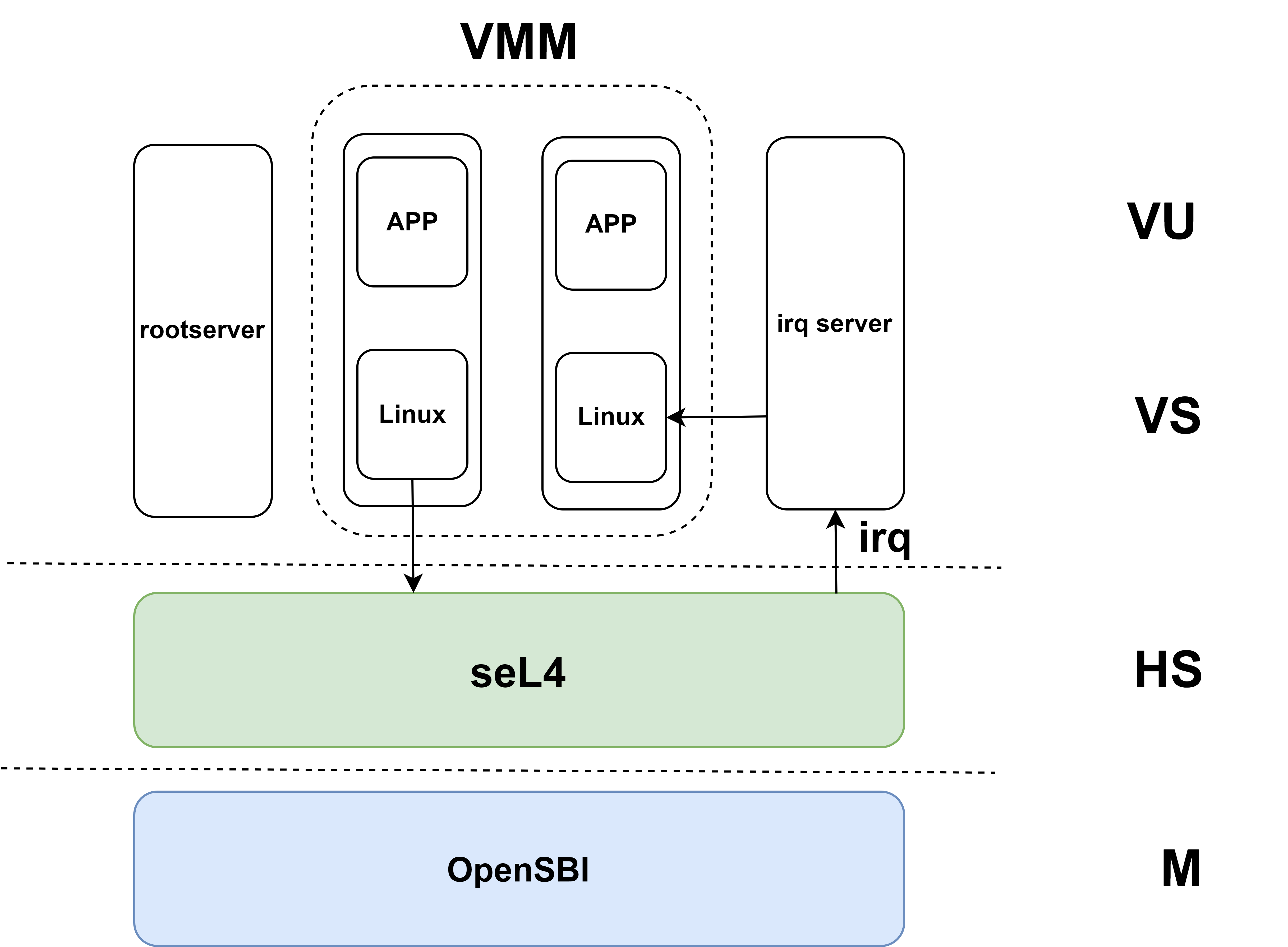
sel4-riscv-vmm#
该项目还处于试验阶段,支持 v0.6.1 RISC-V Hypervisor 指令扩展。
irq_server_node
struct irq_server_node {
/// Information about the IRQ that is assigned to each badge bit
struct irq_data irqs[NIRQS_PER_NODE];
/// The notification object that IRQs arrive on
seL4_CPtr notification;
/// A mask for the badge. All set bits within the badge are treated as reserved.
seL4_Word badge_mask;
};
struct irq_server_node 维护由该 node 处理的 irq (struct irq_data) ,一个 irq 对应 badge 的一位,通过 Notification 从接收 irq ,由 irq_server_node_handle_irq 根据 badge 通过调用预先注册的 handler 对所有收到的 irq 进行处理。irq_bind 函数根据 irq 序号分配 irq_cap ,并设置 notification_cap 中 badge 的对应位,最后将该 notification_cap 绑定到 irq_cap 。irq_server_node_register_irq 注册由该 node 处理的 irq 和 handler。
irq_server_thread
struct irq_server_thread {
/// IRQ data which this thread is responsible for
struct irq_server_node *node;
/// A synchronous endpoint to deliver IRQ messages to.
seL4_CPtr delivery_sep;
/// The label that should be assigned to outgoing synchronous messages.
seL4_Word label;
/// Thread data
sel4utils_thread_t thread;
/// notification object data
vka_object_t notification;
/// Linked list chain
struct irq_server_thread *next;
};
函数 irq_server_thread_new 初始化内核结构,并创建 irqserver 线程,入口为 _irq_thread_entry ,其中 delivery_sep 为可选结构,用来向其他 ep 发送 irq 信息。_irq_thread_entry 轮询 notification 消息来获取中断,如果未注册用于同步发送消息的 sep 就直接调用 handler 。
这部分函数比较关键,感觉用户态中断可以支持这部分功能。
irq_server
struct irq_server {
seL4_CPtr delivery_ep;
vka_object_t reply;
seL4_Word label;
int max_irqs;
vspace_t *vspace;
seL4_CPtr cspace;
vka_t* vka;
seL4_Word thread_priority;
simple_t simple;
struct irq_server_thread *server_threads;
void *vm;
/* affinity of the server threads */
int affinity;
};
函数 irq_server_handle_irq_ipc 用于其他线程处理 irqserver 以 IPC 形式转发的 irq 信息。函数 irq_server_register_irq 先遍历当前 irq nodes 并将 irq 委托给其中一个 thread ,否则创建新的 thread 。函数 irq_server_new 初始化 server 结构,如果需要处理默认指定的 irq ,则根据传入的 irq 数量创建 thread 。
函数 vm_add_vcpu 在 vm 中添加 vcpu 同时指定核号,配置参数 CONFIG_PER_VCPU_VMM 决定是否为每个 vcpu 创建 vmm_thread (源码仓库默认关闭);此外还包括一些资源分配:为 vcpu 分配 badge 中的一位,创建 TCB 来对 vcpu 进行调度,并将 vcpu 绑定到物理核上。函数 vm_create 创建 0 号 vcpu ,并对 fault system 进行初始化。函数 vmm_init 对 vmm 进行初始化,boot 参数配置并初始化全局 irq_server 。
linux_irq 包括 UART 和每个 vcpu 对应的 VTIMER (vcpu 数量取决于配置参数 CONFIG_MAX_NUM_NODES)。当 irq_server 的某个 thread 收到 irq 后,会进入 irq_handler 并调用 vm_inject_IRQ 将中断注入到对应的 vcpu 中,中断的编号由 token 中包含的 virq 信息指定。
Linux 默认通过 sbi call 来完成 putchar 、settimer、ipi 等操作,在 VM 中会转换为 HYPCALL ,例如 IPI (send 或 clear)就是直接向目标 vcpu 进行注入。